定义
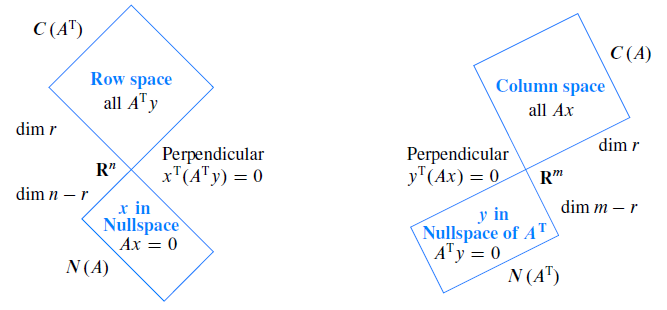
设A是m×n的矩阵,定义以下四个子空间
| 名称 |
符号 |
集合 |
维数 |
| 列空间 |
C(A) |
{Ax ∣ ∀x∈Rn} |
r |
| 行空间 |
C(AT) |
{ATy ∣ ∀y∈Rm} |
r |
| 零空间 |
N(A) |
{x ∣ ∀x∈Rn,Ax=0} |
n−r |
| 左零空间 |
N(AT) |
{y ∣ ∀y∈Rm,ATy=0} |
m−r |

性质1
C(A)⊥N(AT)C(AT)⊥N(A)
也就是在Rm中
C(A)=N(AT)⊥orC(A)⊥=N(AT)
在Rn中
C(AT)=N(A)⊥orC(AT)⊥=N(A)
证明C(A)⊥=N(AT)
取∀x∈N(AT), ∀y∈C(A)。则∃z∈Rn,使得
y=Az
计算xTy,其中注意到ATx=0
xTy=xTAz=(ATx)Tz=0
即可得出
x⊥y→x∈C(A)⊥
所以
N(AT)⊆C(A)⊥
取∀x∈C(A)⊥, ∀y∈C(A)。则∃z∈Rn,使得
y=Az
则因为x,y的空间互为正交补
xTy=xTAz=(ATx)Tz=0
因为z∈Rn,所以
ATx=0
即
x∈N(AT)
即可得出
C(A)⊥⊆N(AT)
综上
{N(AT)⊆C(A)⊥C(A)⊥⊆N(AT)⇒N(AT)=C(A)⊥
证明C(AT)⊥=N(A)
取∀x∈N(A), ∀y∈C(AT)。则∃z∈Rn,使得
y=ATz
计算xTy,其中注意到ATx=0
xTy=xTATz=(Ax)Tz=0
即可得出
x⊥y→x∈C(AT)⊥
所以
N(A)⊆C(AT)⊥
取∀x∈C(AT)⊥, ∀y∈C(AT)。则∃z∈Rn,使得
y=ATz
则因为x,y的空间互为正交补
xTy=xTATz=(Ax)Tz=0
因为z∈Rn,所以
Ax=0
即
x∈N(A)
即可得出
C(AT)⊥⊆N(A)
综上
{N(A)⊆C(AT)⊥C(AT)⊥⊆N(A)⇒C(AT)⊥=N(A)